


ADwin-Pro II
Bus Numériques
Les systèmes ADwin-Pro II supportent divers bus numériques leur permettant d'échanger des données avec divers équipements, automates, ou composants. Ces interfaces sont brièvement décrites dans cette rubrique
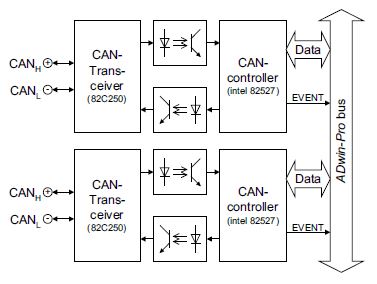
Bus CAN : Pro II-CAN-2
Les modules Pro II-CAN-2 sont équipés de 2 interfaces CAN indépendantes. Ces modules existent en deux versions, pour le bus CAN haute vitesse et pour le bus CAN basse vitesse :
• Pro II-CAN-2 : 2 interfaces haute vitesse,
• Pro II-CAN-2-LS : 2 interfaces basse vitesse.
Ces modules sont équipés d'un coprocesseur TiCo intégré qui permet de développer des process temps réel s'exécutant sur le module plutôt que sur le processeur temps réel central du châssis ADwin-Pro II. Ce coprocesseur peut accéder directement aux 2 interfaces CAN du module et peut échanger des données avec le processeur temps réel central. Les process dédiés à ce coprocesseur sont développés via le langage TiCoBasic. Ils sont généralement utilisés pour localement la gestion des échanges de messages CAN spécifiques. Ce coprocesseur est équipé d'un BootLoader dédié, cela permet de stocker les process dans une mémoire non volatile du module. A la mise en service du châssis ADwin-Pro II, les process sont directement utilisables et peuvent être démarrés automatiquement.
Le coprocesseur TiCo est équipé de 28 KO de mémoire pour les programmes et de 28 KO de mémoire pour les données.
Les interfaces CAN sont implémentées via l'utilisation de deux contrôleurs CAN de type Intel Controller AN82517. Ces composants sont conformes à la spécification CAN 2.0 Parts A et B, et à la norme ISO 11898.
La version haute vitesse peut utiliser une fréquence de bus jusqu'à 1 MHz. La version basse vitesse peut utiliser une fréquence de bus jusqu'à 125 KHz.
Les bus CAN sont isolées par des optocoupleurs.
Les bus CAN sont traités en temps réel. Une arrivée de message CAN peut déclencher une interruption qui génère un évènement vers le processeur temps réel central ou vers le coprocesseur TiCo. Ainsi, un traitement temps réel immédiat des messages est garanti.
La version basse vitesse nécessite une alimentation externe de 12 V pour chacune des interfaces
Les modules sont équipés de micro interrupteurs permettant de leur adjoindre ou non une terminaison via une résistance de 120 Ohms. Si une interface est localisée à une extrémité du bus CAN, cette terminaison doit être activée.
Chaque interface dispose de son propre connecteur SubD 9 broches.
Bus RS232/485 : Série Pro II-RS
Les systèmes ADwin-Pro II supportent les bus série RS232 et RS485 via deux modules :
• Pro II-RSx-2 : 2 ports série RS232/485,
• Pro II-RSx-4 : 4 ports série RS232/485.
La version 2 ports utilise un seul emplacement des la châssis ADwin-Pro II. La version 4 ports utilise 2 emplacements. Les ports sont implémentés via des connecteurs SubD 9 broches.
Ces modules sont équipés d'un coprocesseur TiCo intégré qui permet de développer des process temps réel s'exécutant sur le module plutôt que sur le processeur temps réel central du châssis ADwin-Pro II. Ce coprocesseur peut accéder directement aux 2 interfaces CAN du module et peut échanger des données avec le processeur temps réel central. Les process dédiés à ce coprocesseur sont développés via le langage TiCoBasic. Ils sont généralement utilisés pour localement la gestion des échanges de messages série spécifiques. Ce coprocesseur est équipé d'un BootLoader dédié, cela permet de stocker les process dans une mémoire non volatile du module. A la mise en service du châssis ADwin-Pro II, les process sont directement utilisables et peuvent être démarrés automatiquement.
Le coprocesseur TiCo est équipé de 28 KO de mémoire pour les programmes et de 28 KO de mémoire pour les données.
Les ports série sont équipés d'un composant UART "Quad Universal Asynchronous Receiver/Transmitter" de type TL16C754 de Texas Instruments®. Ils sont indépendants et peuvent être configurés individuellement en RS232 ou en RS485. Chaque port dispose d'une FIFO de 64 octets. Les paramètres de handshake, parité, nombre de bits de données, nombre de bits de stop, vitesse en Bauds sont configurables par logiciel. La vitesse maximale est de 2 304 000 Bauds.
Bus RS422 : Pro II-RS422-4
Les systèmes ADwin-Pro II supportent les bus série RS422 via le module Pro II-RS422-4. Ce module est équipé de 4 ports série RS422. Il utilise un seul emplacement des la châssis ADwin-Pro II. Les ports sont implémentés via un unique connecteur SubD 37 broches.
Ces modules sont équipés d'un coprocesseur TiCo intégré qui permet de développer des process temps réel s'exécutant sur le module plutôt que sur le processeur temps réel central du châssis ADwin-Pro II. Ce coprocesseur peut accéder directement aux 2 interfaces CAN du module et peut échanger des données avec le processeur temps réel central. Les process dédiés à ce coprocesseur sont développés via le langage TiCoBasic. Ils sont généralement utilisés pour localement la gestion des échanges de messages série spécifiques. Ce coprocesseur est équipé d'un BootLoader dédié, cela permet de stocker les process dans une mémoire non volatile du module. A la mise en service du châssis ADwin-Pro II, les process sont directement utilisables et peuvent être démarrés automatiquement.
Le coprocesseur TiCo est équipé de 28 KO de mémoire pour les programmes et de 28 KO de mémoire pour les données.
Les ports série sont équipés d'un composant UART "Quad Universal Asynchronous Receiver/Transmitter" de type TL16C754 de Texas Instruments®. Chaque port dispose d'une FIFO de 64 octets. Les paramètres de handshake, parité, nombre de bits de données, nombre de bits de stop, vitesse en Bauds sont configurables par logiciel. La vitesse maximale est de 2 304 000 Bauds.
Bus LIN : Pro II-LIN-2
Les systèmes ADwin-Pro II supportent le bus LIN via le module Pro II-LIN-2. Ce mdoule est équipé de deux interfaces LIN indépendantes pouvant être configurées comme maitre ou esclave sur le bus LIN.
Tous les paramètres fonctionnels des bus peuvent être réglés via le logiciel. La terminaison des bus est automatiquement mise en oeuvre en fonction de ces paramètres.
Ce module utilise un emplacement dans le châssis. Chaque interface dispose de son propre connecteur SubD 9 broches.
Les interfaces LIN implémentées par ce module sont conformes à la norme LIN 2.1 de Novembre 2006.
Le bus LIN est un protocole de communication série sur 1 seul fil fonctionnant à un vitesse de 20 KBits. Il est largement utilisé dans le monde de l'automobile et de la mécatronique.
Esclave Profibus : Pro II-Profi-SL
Ce module permet d'ajouter aux systèmes ADwin-Pro II un port pour bus de terrain PROFIBUS fonctionnant en mode esclave. Tous les paramètres de ce port sont réglables par logiciel.
Le fichier de configuration GSD de l'esclave PROFIBUS est fournie et doit être utilisé afin de projeter sa configuration sur le noeud maître du bus PROFIBUS.
Ce port PROFIBUS est conforme à la norme : Européen Standard EN 50710, Volume 2.
Esclave EtherCAT : Pro II-EtherCAT-SL
Ce module permet d'ajouter aux systèmes ADwin-Pro II un port pour bus de terrain EtherCat fonctionnant en mode esclave. Tous les paramètres de ce port sont réglables par logiciel.
Le fichier de configuration XML de l'esclave EtherCat est fourni et doit être utilisé afin de projeter sa configuration sur le noeud maître du bus EtherCat.
Ce port EtherCat est conforme à la norme IEC 61158 et IEC61784-2.
Bus Flexray : Pro II-FlexRay-2
Ce module implémente deux interfaces FlexRay. Chaque interface représente un bus FlexRay complet avec 2 canaux.
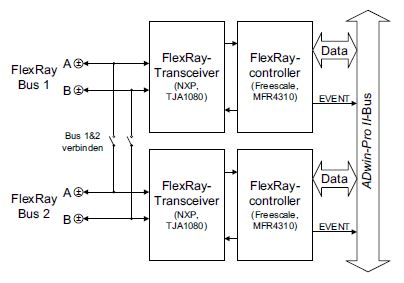
Le module peut être configuré pour démarrer un bus FlexRay sans autres membres sur le bus. Pour cela, chacune des interfaces met en oeuvre une procédure de démarrage à froid et doivent être combinées à un bus via des micro interrupteurs. Les terminaisons sont également attribuées via des micro interrupteurs.
Le module est équipé de deux controleurs FlexRay FREESCALE MFR4310 conformes à la spécification FlexRay 2.1.
Ce module utilise 1 emplacement dans le châssis et chaque interface dispose de son propre connecteur Sub D 9 broches.
Bus MIL-STD-1553 : Pro II-MIL-1553
Ce module implémente une interface multifonction pour le bus MIL-STD-1553. Ce bus série largement utilisé dans le équipements aéronautiques et spatiaux, tant les domaines civils que militaires. Le module est équipé de deux interfaces A et B qui sont dédiées au monitoring des bus en mode SMT 16 bits.
Le module implémente la fonctionnalité SMT des bus MIL-STD-1553 via un composant Holt Integrated Circuits HI-6130.
Utilisé en mode SMT, le module acquiert les messages de commandes, de données et les réponses des terminaux. A la mise sous tension le module enregistre tous les messages. Il est possible de filtrer les messages enregistrés. Le filtrage est basé sur les adresses et sous-adresses des noeuds RT du bus ainsi que sur l'état des drapeaux de transmission/réception.
Le monitoring est mis en oeuvre via 2 buffers distincts : Buffer de commandes contenant le mot de commande émis par le noeud BC, le contenu du message et l'horodatage du message. Buffer d'états contenant des informations complémentaires sur le message, l'utilisation des bus A/B et des erreurs survenues.
Ce module utilise 1 emplacement dans le châssis. Chaque bus dispose de son connecteur triaxial :

Bus ARINC-429 : Pro II-ARINC-429
Le module Pro II-ARINC-429 implémente une interface pour le bus série ARINC-429 pour 1 voie transmetteur et 2 voies récepteur. Toutes les voies peuvent être utilisées en parallèle.
Le bus ARINC-429 est un moyen de communication largement répandu dans les domaines de l'aéronautique. Il s'agit d'un bus série permettant de relier via des paires de câbles dédiées un transmetteur et jusqu'à 20 receveurs. La vitesse de transfert peut être de 100 KBits/s ou de 12,5 KBits/s. Le bus implémente son horodatage et un protocole de synchronisation. Les données ne peuvent être transmises que dans une direction (Simplex Communication). Les échanges bidirectionnels impose l'utilisation de deux canaux. Les messages ARINC-429 sont constitués de 32 bits composés de 5 champs : Label, Source/Destination, données, matrice d'états, parité.
Ce module utilise 1 emplacement dans le châssis ADwin-Pro II. Le connecteur est de type SubD 25 broches.
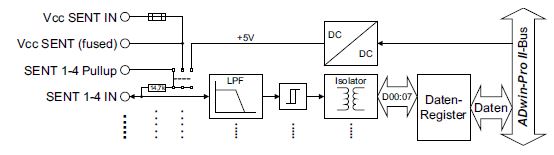
Protocole SENT : Série Pro II-SENT
Les systèmes ADwin-Pro II peuvent échanger des données selon le protocole SENT (Single Enge Nibble Tranmission) au moyen de 3 modules différents :
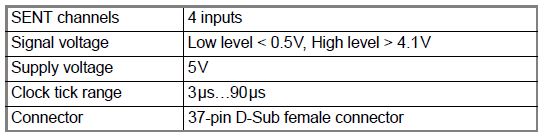
• Pro II-SENT-4 : Analyse de signaux SENT sur 4 voies indépendantes,
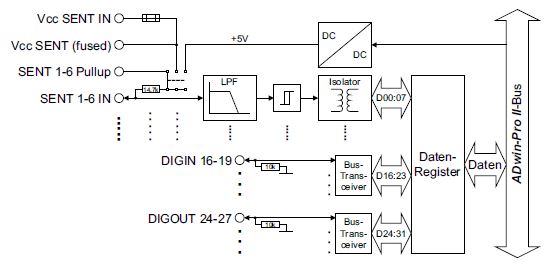
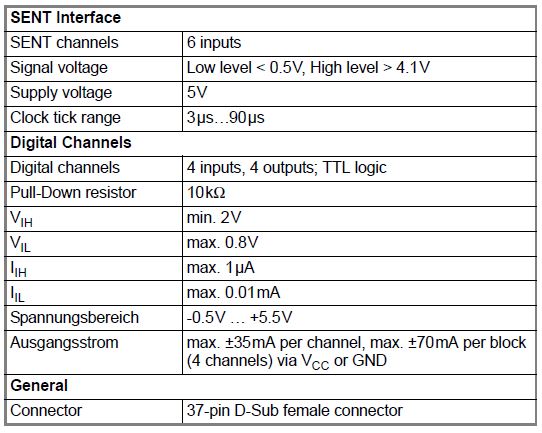
• Pro II-SENT-6 : Analyse de signaux SENT sur 6 voies indépendantes. Implémente également 4 entrées et 4 sorties numériques,
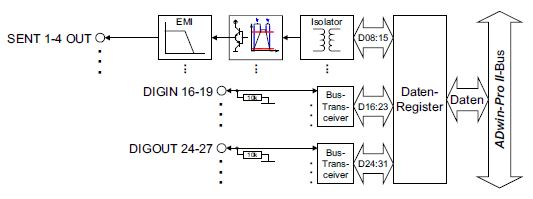
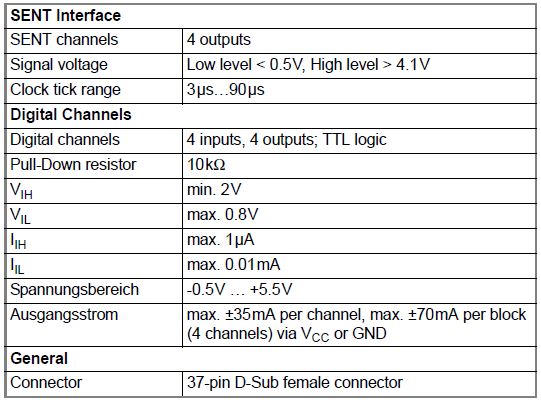
• Pro II-SENT-4-OUT : Implémente 4 voies de sortie SENT. Implémente également 4 entrées et 4 sorties numériques,
Tous ces modules sont conformes à la norme SAE J2716. Ils utilisent 1 emplacement dans le châssis et leur connecteurs sont de types SubD 37 broches. Leurs spécifications sont décrites ci-dessous.
- Pro II-SENT-4
- Pro II-SENT-6
- Pro II-SENT-4-OUT
Bus SPI : Pro II-SPI-2
Les communications sur le bus SPI sont implémentées via deux modules :
• Pro II-SPI-T : 2 bus SPI indépendants en TTL, 22 sorties digitales CS (Ship Select)
• Pro II-SPI-D : 2 bus SPI indépendants en différentiel, 8 sorties TTL et 4 sorties différentielles CS (Chip Select).
Ces modules sont équipés d'un coprocesseur TiCo intégré qui permet de développer des process temps réel s'exécutant sur le module plutôt que sur le processeur temps réel central du châssis ADwin-Pro II. Ce coprocesseur peut accéder directement aux 2 interfaces SPI du module et peut échanger des données avec le processeur temps réel central. Les process dédiés à ce coprocesseur sont développés via le langage TiCoBasic. Ils sont généralement utilisés pour localement la gestion des échanges de messages SPI spécifiques. Ce coprocesseur est équipé d'un BootLoader dédié, cela permet de stocker les process dans une mémoire non volatile du module. A la mise en service du châssis ADwin-Pro II, les process sont directement utilisables et peuvent être démarrés automatiquement.
Le coprocesseur TiCo est équipé de 28 KO de mémoire pour les programmes et de 28 KO de mémoire pour les données.
Les deux bus SPI peuvent être configurés selon les modes opératoires suivants :
• Les deux bus en mode maître,
• Les deux bus en mode esclave,
• Bus 1 en mode maître, bus 2 en mode esclave.
Selon le mode opératoire, le connecteur SubD 37 broches est reconfiguré afin d'être adapté au mode opératoire.
Les divers modes SPI dépendants de la polarité et de la phase de la ligne d'horloge SCLK sont utilisables.
Chaque interface dispose de ses propres lignes MOSI, MISO, SCLK et CS. La ligne CS est automatiquement gérée lors des opérations de lecture ou d'écriture et si l'interface est utilisée en mode maître. Cependant il est possible d'utiliser d'autres lignes numériques disponibles pour implémenter plusieurs CS liées à des périphériques distincts.